


特种车辆自动驾驶可提高物流运输效率,和港口,园区的管理水平,以及满足人们对生活品质日益提高的追求。自动驾驶的关键技术主要包括环境感知,导航定位,路径规划,决策控制等。环境感知包括汽车自身位姿感知和周围环境感知两部分,自身位姿信息主要包括车辆的自身速度,加速度,倾角,位置等信息。导航定位技术用于确定车辆自身的地理位置,为自动驾驶车辆的路径规划和任务规划提供重要的支撑。918博天堂官网凭借多年北斗高精度定位技术的积累和沉淀,提出一种高精度车辆自身位姿信息感知和高精度导航定位的解决方案。尤其适合特种车辆自动驾驶高精度定位产品的要求。

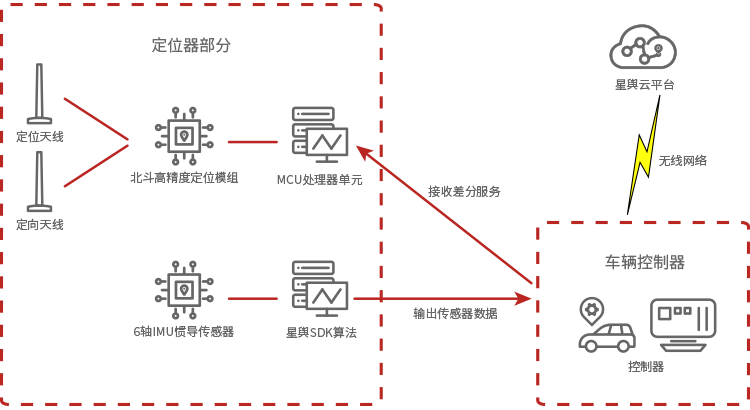
架构说明:




| 频率 | GPS:L1 C/A,L2C,L2P,L5 GLONASS:G1,G2 BDS:B1I,B2I,B3I,B1C,B2a Galileo:E1,E5A,E5B |
| 定位时间 | 冷启动 <50s 热启动 <10s |
| 单点定位精度(RMS) | 水平:1.5m 高程:2.5m |
| RTK定位精度 | 水平:1cm+1ppm 高程:1.5cm+1ppm |
| 最大数据速率 | GNSS观测量&RTK定位:5Hz IMU原始数据速率:100Hz |
| 陀螺仪性能 | 量程:±450 deg/s 零偏重复性:0.1deg/s 零偏稳定性:1.2deg/hr 角度随机游走:0.08deg/√ hr |
| 加速度计性能 | 量程:±10 g 零偏稳定性:1.2deg/hr 零偏稳定性:1.2deg/hr 角度随机游走:0.08deg/√ hr |





























